| |
| |
Real-time Image Acquisition
Real-time Image Processing
GigE-Vision Protocol
GenICam Configuration
OpenCV compatible
SIMD compatible
GVCP Asynchronous Transfer
GVSP Synchronous Transfer
Bandwidth Control
Sequence Log
|
|
Additional Tools
|
|
|
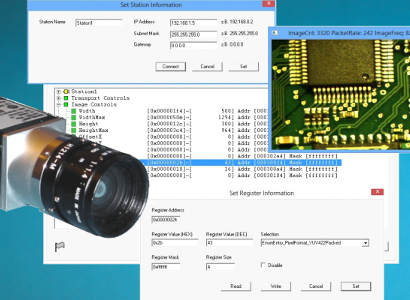
GenICAM Configurator with Diagnostics
|
Typical Applications
|
| |
- Assembly
- Packaging
- Stamping Technology
- Testing Technology
- Metrology
|
|
Worth Knowing ...
|
GigE-Vision Master –
Real-time Library for Industrial Image Processing
|
Until now, real-time communication under Windows was mostly restricted to specific fieldbus systems.
With the SYBERA GigE-Vision Master, this restriction is eliminated: The library supports the
GigE-Vision standard for industrial image processing and enables the simple connection of
industrial cameras via Gigabit Ethernet to existing networks.
The standard consists of four elements:
- GigE-Vision Control Protocol (GVCP): defines camera addressing via UDP, including data channels and control mechanisms.
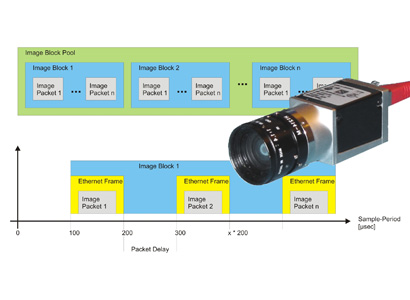
- GigE-Vision Stream Protocol (GVSP): enables efficient image transfer via UDP with optional error correction.
- Device Discovery: Finding and addressing cameras in the network.
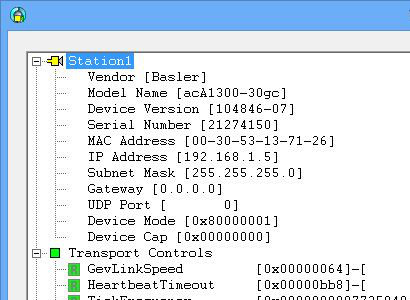
- GenICam XML Description: provides standardized camera data and parameters (GenICam Standard).
Thanks to the integrated bandwidth control of the X-Realtime Cluster Engine,
the complete control cycle Vision Sensor Technology → Image Processing → Fieldbus Actuator Technology can be deterministically distributed across various fieldbus systems.
Configuration is done via the GenICam parameter standard (e.g., Basler Cameras) and real-time image processing can be performed using libraries such as
OpenCV. The GigE-Vision Master works directly via standard Ethernet adapters, but supports over 70 different adapters thanks to the
Ethernet Realtime Core extension.
|
GigE-Vision Master Functionality
|
|
The GigE-Vision Master is an open real-time library for Windows.
Developers can use it to program deterministic control of cameras in combination with fieldbus systems.
Simple interface functions allow graphical design of vision applications, parametrization of camera parameters, and
creation of logical links. The Master protocol management (GVCP & GVSP), including error handling and device logistics,
is completely taken over by the library, allowing developers to concentrate on processing the image data.
|
GigE-Vision Master Technology
|
|
The Master meets the requirements of the GigE-Vision Specification 2.0
and is designed as an open programming system. Critical timing of the GVSP protocol is ensured by integrated bandwidth control
and four real-time tasks for sending, receiving, and cyclic data exchange.
A state machine synchronizes the tasks, while a real-time error task detects frame errors and hardware latencies.
Acyclic GVCP Vision frames are separated in real-time using a frame filter. SYBERA utilizes Dynamic Jitter Compensation,
resulting in minimal jitter (<15 µs depending on hardware), which is negligible even with industrial Ethernet components. This enables precise control and synchronization of drive controllers.
|
| |
